![]()
| Group: DynoMotion | Message: 13435 | From: andysontag | Date: 7/3/2016 |
| Subject: Closed Loop Stepper Tuning Help Needed | |||
|
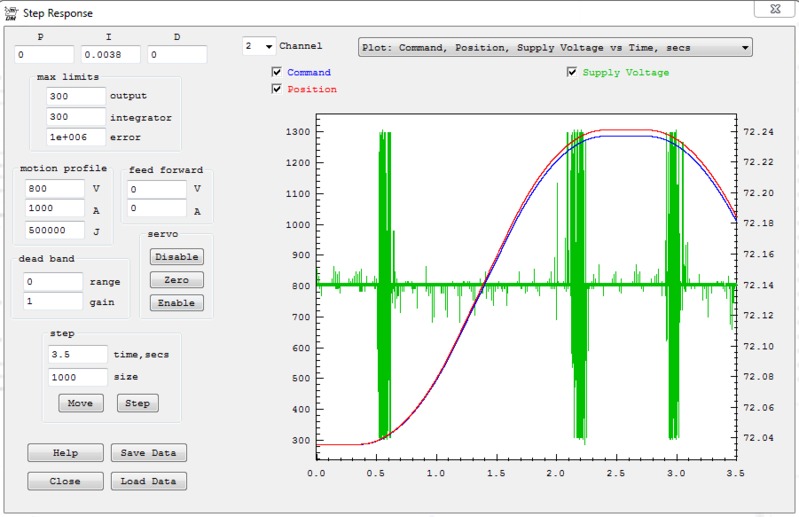
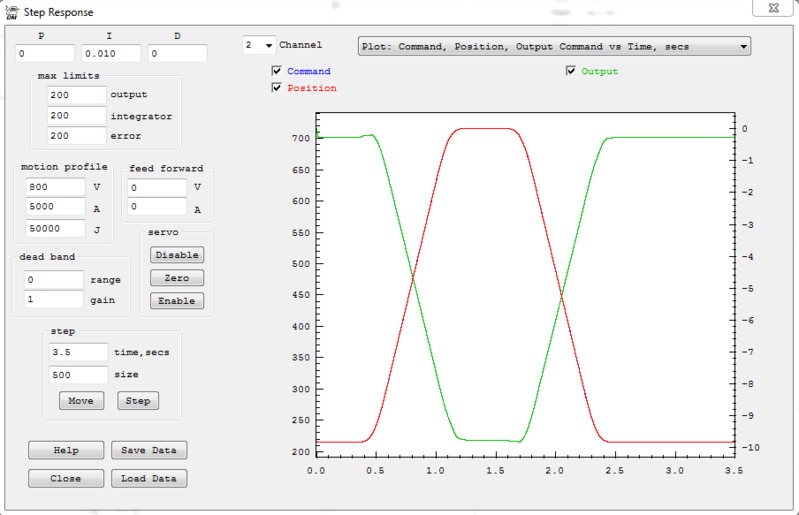
@@attachment@@
|
| Group: DynoMotion | Message: 13436 | From: Tom Kerekes | Date: 7/3/2016 |
| Subject: Re: Closed Loop Stepper Tuning Help Needed [7 Attachments] | |||
|
| Group: DynoMotion | Message: 13437 | From: andysontag | Date: 7/3/2016 |
| Subject: Re: Closed Loop Stepper Tuning Help Needed | |||
|
@@attachment@@
|
| Group: DynoMotion | Message: 13445 | From: andysontag | Date: 7/4/2016 |
| Subject: Re: Closed Loop Stepper Tuning Help Needed | |||
|
@@attachment@@
|
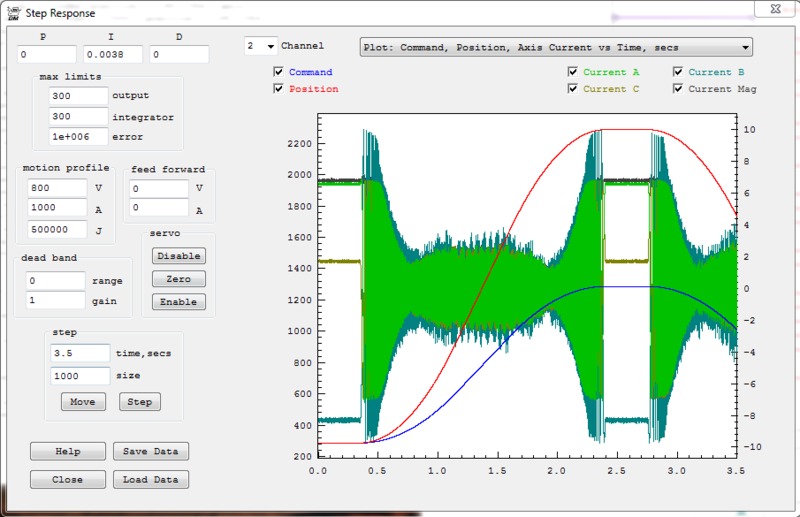
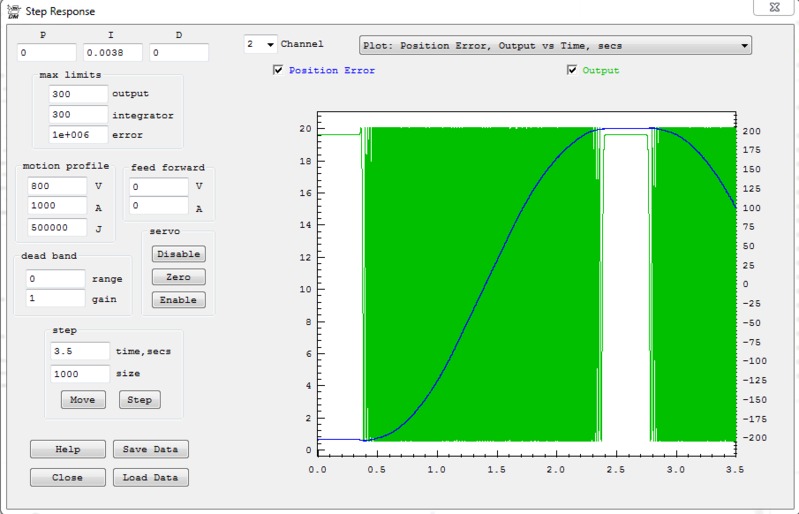
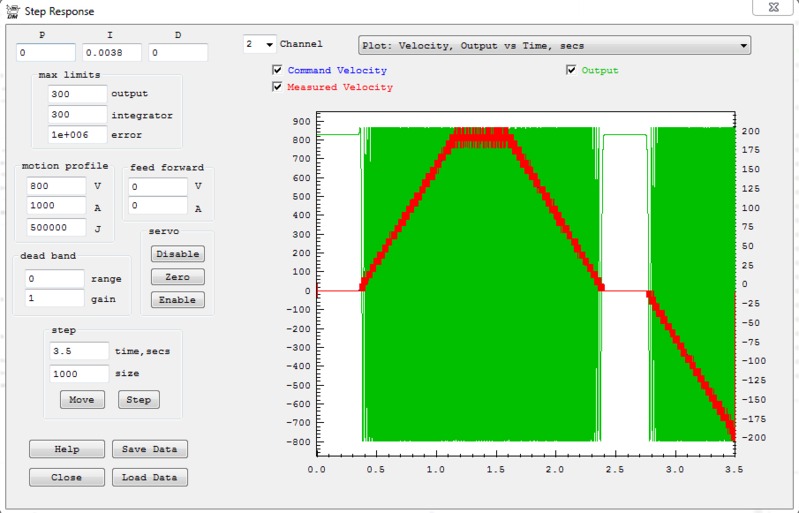
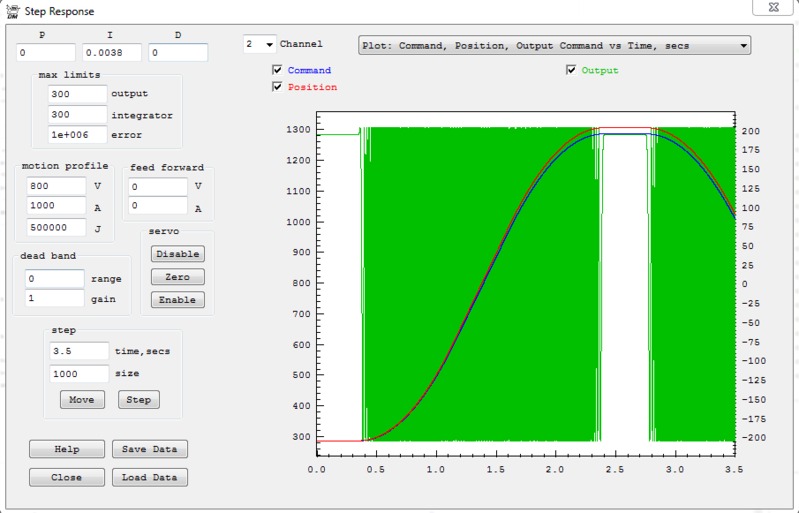
| Group: DynoMotion | Message: 13465 | From: Tom Kerekes | Date: 7/5/2016 |
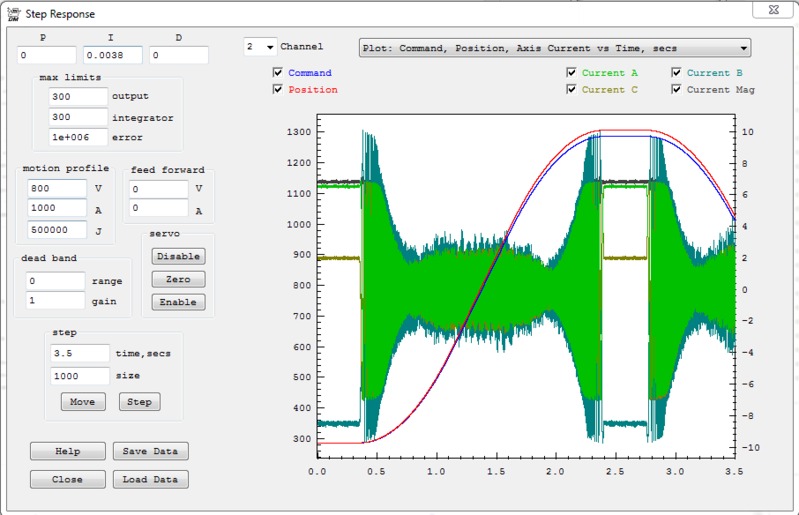
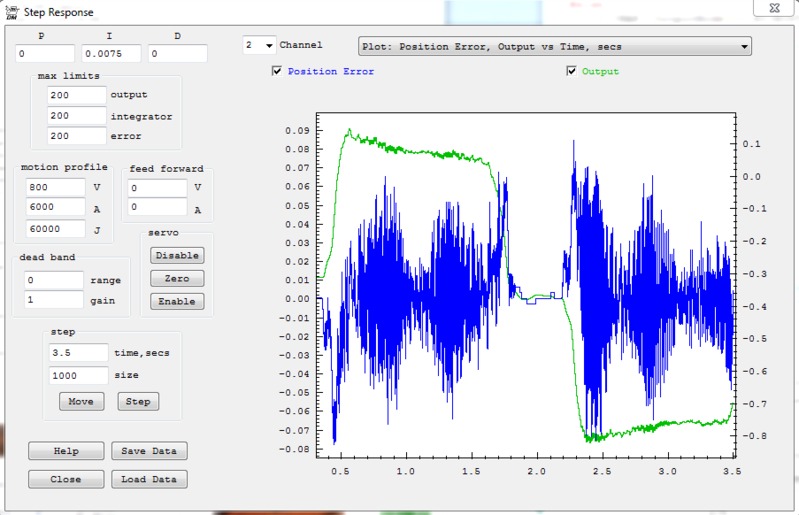
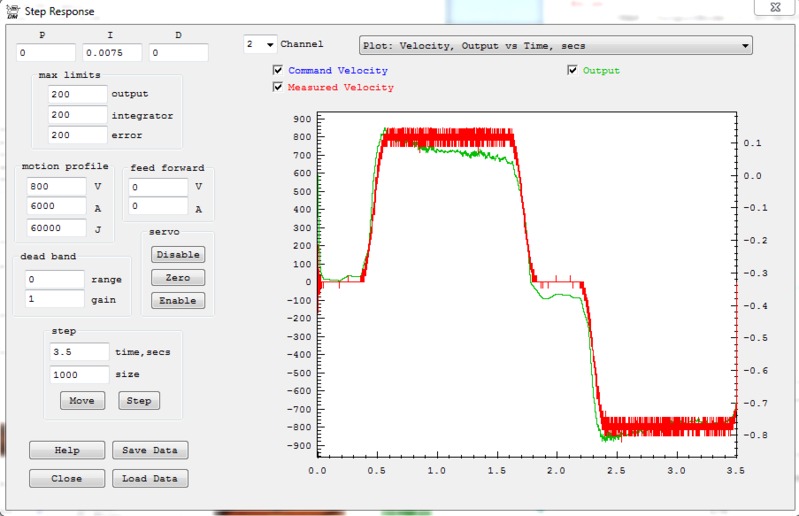
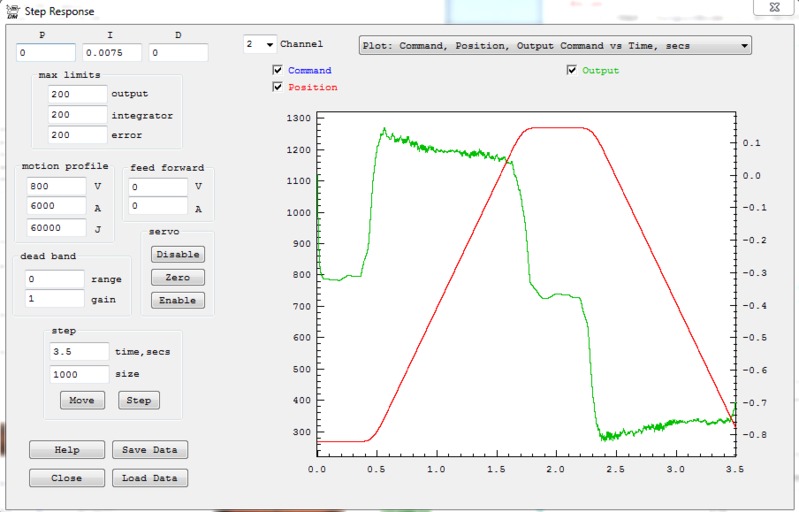
| Subject: Re: Closed Loop Stepper Tuning Help Needed [5 Attachments] | |||
|
| Group: DynoMotion | Message: 13466 | From: Tom Kerekes | Date: 7/5/2016 |
| Subject: Re: Closed Loop Stepper Tuning Help Needed [3 Attachments] | |||
|
| Group: DynoMotion | Message: 13485 | From: andysontag | Date: 7/6/2016 |
| Subject: Re: Closed Loop Stepper Tuning Help Needed | |||
|
@@attachment@@
|
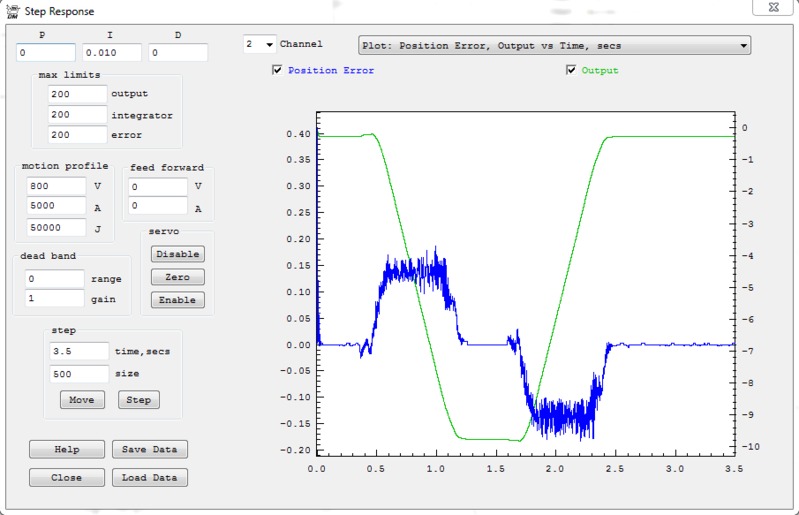
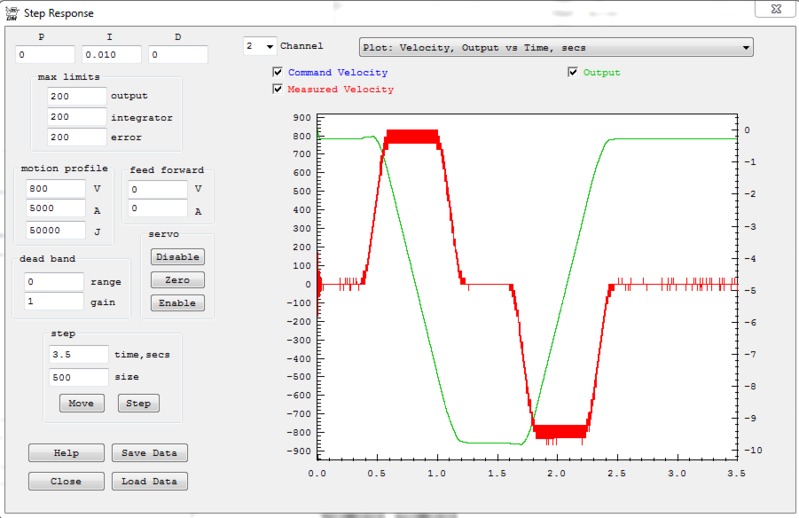
| Group: DynoMotion | Message: 13486 | From: Tom Kerekes | Date: 7/6/2016 |
| Subject: Re: Closed Loop Stepper Tuning Help Needed [6 Attachments] | |||
|
| Group: DynoMotion | Message: 13513 | From: Andy Sontag | Date: 7/8/2016 |
| Subject: Re: Closed Loop Stepper Tuning Help Needed | |||
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}